



今天又和大家在皆电APP相见啦!
又来跟各位小伙伴分享我跟极氪的日常啦~
我是你们的好朋友极氪001车主——博尔赫斯的南方
本次我想跟大家聊两个话题,一是极氪001的NZP到底什么水平、好不好呢?二是极氪001的NZP安全吗、敢用吗?
一、🎖️🥇极氪001的NZP到底什么水平、好不好呢?
在回答这个问题之前,首先我们得深入了解自动驾驶的工作原理,它北后的技术核心逻辑以及系统框架,只有了解理解了自驾驾驶的工作原理,才能客观的、较公平的去评价极氪NZP是属于什么水平、什么档次。经历过两次NZP的先锋体验、利用自己的专业收集了一些自动驾驶专业知识,向大家简单分享一些自动驾驶方面科普知识(如果要长篇分享的话,估计得3万个字)。
首先,汽车自动驾驶的等级被分为L0-L5六个等级,分别是L0:纯人工驾驶、L1:驾驶自动化、L2:辅助驾驶、L3:自动辅助驾驶、L4:自动驾驶、L5:无人驾驶。按这个等级标准,我认为极氪的NZP属于高阶的L3水平。
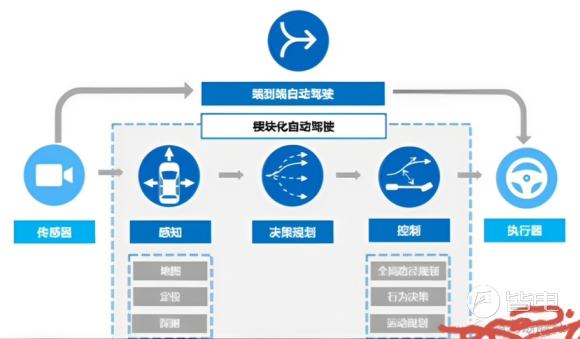
说道自动驾驶系统,它主要有环境感知系统、决策与规划系统、控制执行系统。
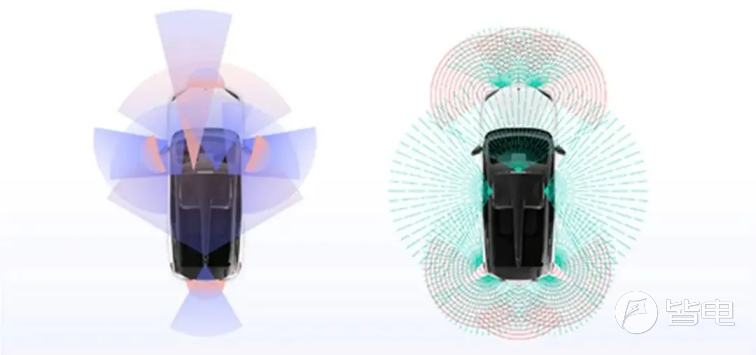
环境感知系统主要负责汽车的定位、静态障碍物的识别与绘制、移动障碍物的检测与跟踪、道路车道的映射、交通信号与标志的检测和识别,就像人的眼睛与耳朵,耳听八方眼观六路。极氪001配置了哪些眼睛和耳朵呢?极氪001搭载了7个800万像素的长距离摄像头、4个环视摄像头、2个车内摄像头、1个车外监测摄像头、1个后置流媒体摄像头,12个超声波雷达、1个毫米波雷达,仅有一个毫米波雷达,没有激光雷达(激光雷达使用的是激光脉冲来测量距离并创建三维地图,它比超声波、毫米波雷达要更精准),所以极氪001的眼睛与耳朵不算先进。
决策与规划系统主要是负责路线与路径的规划、运动规划和控制指令下发等相关的工作,就像人类的大脑一样负责决策规划,指令下达。它依赖于运动规划算法(变道和并线等机动行为)、防撞算法(避让路上的移动、静态物体)、行为规划算法(计算分析路上物体可能的行为),以及计算机视觉算法。极氪001的大脑配置了2 个 7nm Mobileye EyeQ5H 芯片,最高算力达到48Tops,在当前新能源新势力的算力普遍都在200Tops以上甚至破千,所以极氪001的算力也不算先进,但是够用了。
当然,现在这套自动驾驶是基于纯计算机视觉算法的,自动驾驶还有一个重要因素---高精地图。决策规划系统需要基于车辆的GPS位置、汇集环境感知系统获取的传感数据,与高精地图信息融合,然后决策规划系统使用前面提到的各种算法来分析、规划,做出驾驶决策规划,这样才能让一辆汽车准确无误地驾驶,并能够避让障碍物和道路其他车辆。

控制执行系统主要是负责接收决策规划系统的指令,执行线控驱动、线控制动、线控转向等决策与规划系统发出的底盘控制指令。就像人类的手和脚。
了解自动驾驶各个系统之后,在同等配置条件下,极氪NZP其实还算是比较不错的,起码两年前已经预埋了硬件,在汽车行业有这种前瞻性,值得肯定,那具体使用感受如何,请看第三段落讲解。
二、 极氪NZP高阶领航比自己驾驶更安全吗?
安全驾驶意味着低事故率。一个自动驾驶系统要做到很低的事故率,那么就需要做两件事:发现问题并及时解决问题。据统计:全球来看,人类驾驶汽车时,一亿公里发生致命事故大约1~3起。对于自动驾驶来说,如果希望比人更安全,最好致命事故率再低一个量级,做到十亿公里才发生一起致命性事故。从统计学来说,需要有多次重复的测试,甚至上百上千次以上,这就意味着测试的总量程需要达到1000亿公里,才能有绝对的安全。对这个数据量来说,极氪NZP是远远不够的。但是不要忘了极氪使用的 Mobileye的芯片,极氪没有这么多的数据量, Mobileye有。目前 Mobileye已采集了 200PB 的数据。这些汽车数据集包含了在过去 25 年中超过 200 PB 的真实环境驾驶视频素材,共约1600 万个 1 分钟视频片段。Mobileye 表示,这些数据将投入配合 Mobileye 的计算机视觉技术、以及自然语言理解模型(NLU)使用。这些都十分有助于计算机视觉系统处理边缘计算,以及汽车的自动驾驶技术发展,从而减少汽车自动驾驶的事故率。
另外,Mobileye还有一个大大的责任敏感安全模型(简称RSS)。RSS模型可以结合各种驾驶场景,计算与其他车辆间的安全距离并始终保持安全距离(即使在非常复杂的拥堵条件下超车也可以保障相对安全),从而杜绝与其他车辆发生碰撞或发生交通违规可能。极氪001也是应用了RSS模型,才有了“羚羊避险”的功能。
有了Mobileye的数据支撑,还有RSS的安全模型,所以,极氪NZP是安全的、值得信任的,达到L3级别的高阶自动驾驶产品。

三、🎖️🥇深度先锋体验报告
了解了自动驾驶的工作原理之后,再来分享一下极氪NZP的先锋体验感受。在 NZP 功能主要主动变道超车、按导航变道、自动过匝道、正确选择岔路、智能绕行、拨杆变道等主要功能。
1)🎖️又快又稳、攻守兼备的变道
极氪NZP会与后方来车来一个变道博弈(有时会有试探性的切道动作,像要变线),有合理变道空间之后,即快又稳的驶入左侧通道;当邻近车道上有车压线、变道、加塞等情况下,极氪NZP并不会紧急制动刹车有时也不会礼让,在确保安全行驶的同时,也保障了驾乘舒适性。

2)🎖️“卡身位”式汇入匝道
当001驾驶时需要进入匝道时,很多的司机往往会提前并入离匝道最近的车道上老实行驶。001并不会这样做,而是在离匝道约900米左右,采用“卡身位”的方式,一点点的挤到目标车道汇入匝道中,这一点特别像经验老道的老司机。这要是新手或是其他的自动驾驶,大概率是在距离匝道1.5-2公里处就开始向外侧车道变道。

3)🎖️最快的NZP领航
一般我晚上下班回家,五环不会堵车,一般情况我约30分钟左右能到家,而使用NZP和城市道路自己驾驶与全程我自己驾驶的时间差不多。所以极氪NZP绝对时最快的NZP自动领航。当行驶中遇到慢车时,极氪NZP表现的就会比较“凶猛,它不会老老实实地跟车行驶,而是主动发起变道超车。当然在遇到拥堵龟速行驶时,也会主动发起变道(特别是遇到大货车时)。

4)🎖️“羚羊避险”的NZP
极氪 001 的NZP也是有 “羚羊避险”功能。在五环路上旁边有大货车时,并排驾驶时会偏离大货车驾驶、主动减速避让或快速超车远离,大大提高驾驶的安全性。当遇到后车突然加速,不让变道时,NZP也控制车辆,避免碰撞,向前再次寻找机会,NZP并不是去激烈的对抗,而是精准识别、并做出减速动作,这种安全防御意识,但给人一种安全感,也是极氪NZP的亮点。

5)🎖️拨杆变道
极氪001爱在最左侧车道行驶,当遇到前方有车辆,右侧空旷时,其实是可以利用拨杆变道,这个操作人工干预一下NZP,从而可以更好完成NZP的行驶。这一操作,极氪NZP也是稳、准、狠的完成指令下达。

当然,在宁波开城测试的期间,测试的时候我觉得是不够的,测试也不够充分,更有不够完美的地方。我觉得有以一下几点,希望极氪强大的自动驾驶团队能够看到、综合评估之后,如果觉得便利,请采纳并纳入研发计划中,逐步优化解决。
1)🏎️不正常的变道
遇到在2环上,行驶的车道前方是空旷的,旁边车道有车辆,NZP发起变道指令,有的时候变道成功之后,又发起变道指令回到原先车道上。
原因分析:环境感知系统识别前方车辆不够精准;运动规划算法可能是固定的,不够灵活或是动态刷新慢。
我的建议:加快高精地图数据建模,优化运动规划算法。
2)🏎️先刹车后超车
在变道超车时,习惯性的刹车确认安全车距,再加速超车,这种体验非常不好,易造成不适,甚至晕车现象。
原因分析:我觉得还是算法的问题。
我的建议:优化防撞算法、行为规划算法,同样的体验在LCC模式下也是存在的。
3)🏎️喜欢走最内侧车道
为什么这也是一个不足之处呢。因为五环路上经常会遇到最左侧车道拥挤,最右侧车道畅通,而NZP偏偏 喜欢走最左侧车道,这时,极氪NZP的决策规划系统无法结合实时的数据模型分析得出向右侧变道超车的指令,一直老老实实的车,目前没有遇到能变到右侧车道上的时刻。
我的建议:建议还是优化算法,可以结算实际的数据建模,动态调整算法,优化行驶规划。
整体来说,极氪NZP先解决有没有的问题,再后续优化完善的工作顺序没什么不妥的地方,但是希望能极氪自动驾驶的团队能加强协作,加强沟通,各个环节把好质量关,给用户一个满意的答卷。必定自动驾驶系统是一个系统间的大集成,是一个大工程,要想让NZP达到一个“老司机”的水平,任重而道远。

🎖️🥇【结束语】🥇🎖️
总体来说,极氪的NZP这种高阶辅助驾驶系统,表现还是不错的。在相同硬件配置条件下,我觉得极氪NZP还是有领先感的,期待了两年交出的这张答卷还算满意。极氪NZP是一款“高效”的自动驾驶领航产品,它有变道博弈如此般的“老司机”的水平,以及强大的 “羚羊避险”安全防御能力。在遇到交通拥堵时或是驾驶疲劳时,可以使用NZP领航功能,值得信赖,相信极氪NZP能带车主平安上班、回家。但是宁波开城测试还不到半个月就开通上线,足矣证明极氪对自己的NZP领航产品的自信。一款系统产品有不足之处都是正常的,所以还是建议先锋体验测试出来的不足之处,以及来自老车主的一些建议,极氪团队能认真评估之后,能采纳安排到研发计划中完善优化,给极氪001车主们一个更好的用户体验。
 16
16 收藏
收藏 加电
加电